Realtime dynamic obstacle avoidance for mobile robot
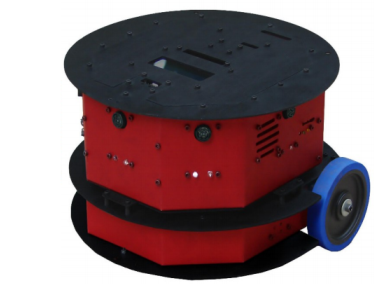
A realtime algorithm based on relative velocity between the robot and an obstacle in its path was designed and implemented on a Firebird 6 robot.
"Dream is not the thing you see in sleep but is that thing that doesn't let you sleep" - Dr. A.P.J Abdul Kalam
I completed my BTech in Electrical and Electronics engineering from College of Engineering, Thiruvananthapuram and joined MRF ltd as Electrical Engineer. During my stay at MRF I developed interest towards control systems. I am currently pursuing my MTech in Systems and Control engineering at Indian Institute of Technology, Bombay .
Following are some courses I have completed during my Bachelor and Master degrees.
A realtime algorithm based on relative velocity between the robot and an obstacle in its path was designed and implemented on a Firebird 6 robot.

The objective of this project is to create an economical aerial vehical that can be used as a personal transport at short distances.
Guide : Prof. Debasish Chatterjee